近日,我院先进光电功能器件及检测技术研究所以“Electrically Controlled Chlamydomonas reinhardtii Micromotors with Rotational and Translational Modes for Microcargo Capture, Transport and Release(具有旋转和平移双运动模式的电控莱茵衣藻微机器人及其在药物颗粒捕获、运输和释放中的应用)”为题在分析化学领域国际顶级期刊《Analytical Chemistry》(中科院一区TOP,IF:6.7)上发表论文。我院陈晓明副教授、赵勇教授为论文通讯作者,东北大学秦皇岛分校为论文第一完成单位。
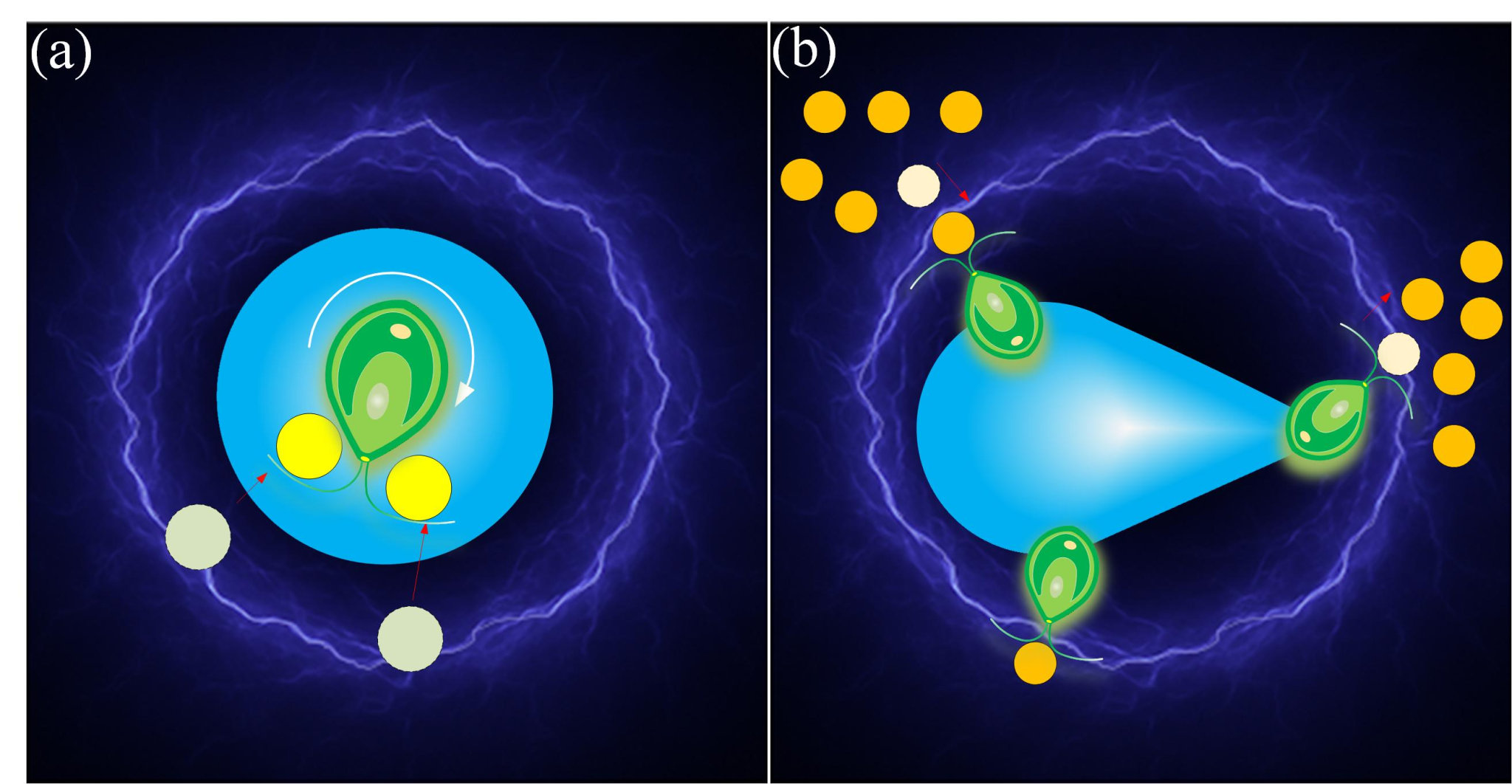
图 1.电控莱茵衣藻微机器人及其在微药物颗粒筛选中的示意图。(a)电旋转驱动模式,微机器人可在旋转模式下捕获和携带微药物;(b)行波介电泳驱动模式,在平移模式下沿电极边缘定向输送并定点释放。
微机器人能高效地将外部能量转化为推进动力,在药物筛选、细胞治疗等生物医学领域具有重要应用前景。但传统合成材料微机器人常面临制备工艺复杂、驱动设备精密昂贵、材料消耗导致续航受限等挑战,且化学驱动方法对介质环境要求苛刻,磁性修饰可能降低细胞活性,光驱动则存在光损伤风险。因此,开发兼具持久推进能力、灵活可控性和良好生物相容性的新型微机器人成为迫切需求。
本研究通过构建莱茵衣藻生物微机器人,依托电旋转和行波介电泳两类电驱动方式,完成微米药物颗粒的精准捕获、转运与释放。先通过数值模拟,剖析形貌尺寸对微机器人电驱运动特性的影响,之后,实验验证其在四相电场内可定点旋转、沿轨迹行进,明确电压、频率对运动状态的调控作用。电旋转工况下可完成药物抓取输送,行波介电泳模式能沿多种异形轨迹移动释药,还可在拐角处稳定停驻。藻细胞可形成主从轮联动结构,边缘细胞转动速率更优。调控电参量可实现个体间换位、绕行协同运动,依托定点制动精准卸放药物。研究最终完成异形电极上药物全流程操控,该微机器人具备良好的药物筛选应用价值。
论文链接:https://doi.org/10.1021/acs.analchem.5c02978
(编辑:周宣任 审核:陈茂庆)




 版权所有©东北大学秦皇岛分校智能感知与光电工程学院 冀公网安备 13030202000995号
版权所有©东北大学秦皇岛分校智能感知与光电工程学院 冀公网安备 13030202000995号 学校主页
学校主页 检索
检索
